Implemented Modules
14
Math Modules
4
Tier 1 (Validated)
5
Tier 2 (Advanced)
5
Tier 3 (Frontier)
8
Engines Tested
Tier 1 — Core Validation
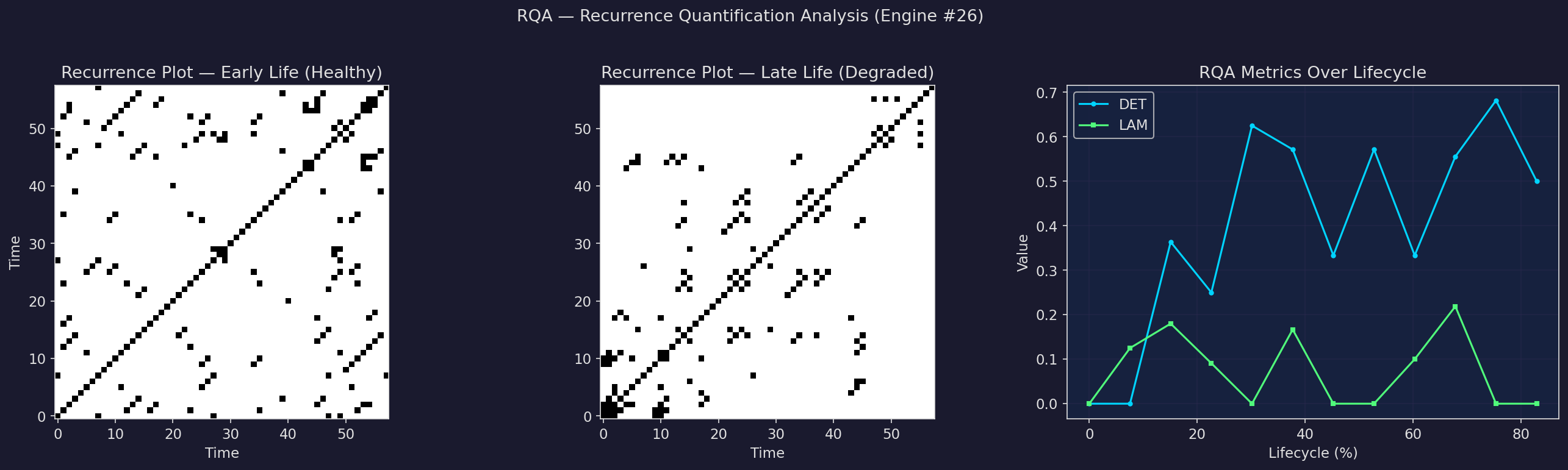
RQA — Recurrence Quantification Analysis
Nonlinear Dynamics Validation of Pattern Retention
DET (determinism) and LAM (laminarity) track the system's dynamical structure
through recurrence plots. Validates that Δ's P component captures genuine
dynamical degradation, not just linear decorrelation.
Multi-engine validation
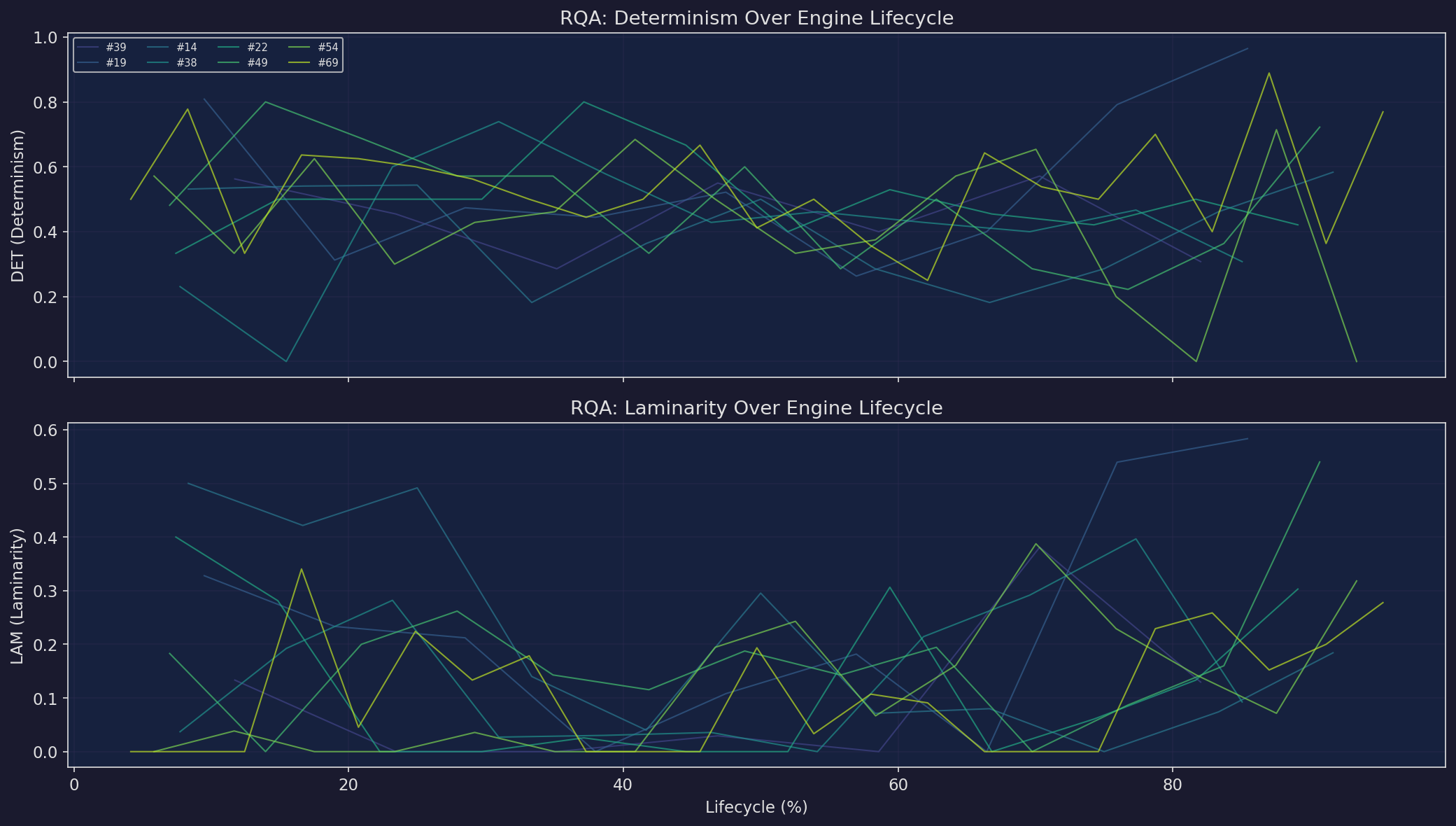
DET and LAM show characteristic evolution over engine lifecycle, confirming
that coherence loss maps to genuine nonlinear dynamical degradation.
Nonlinear Validated
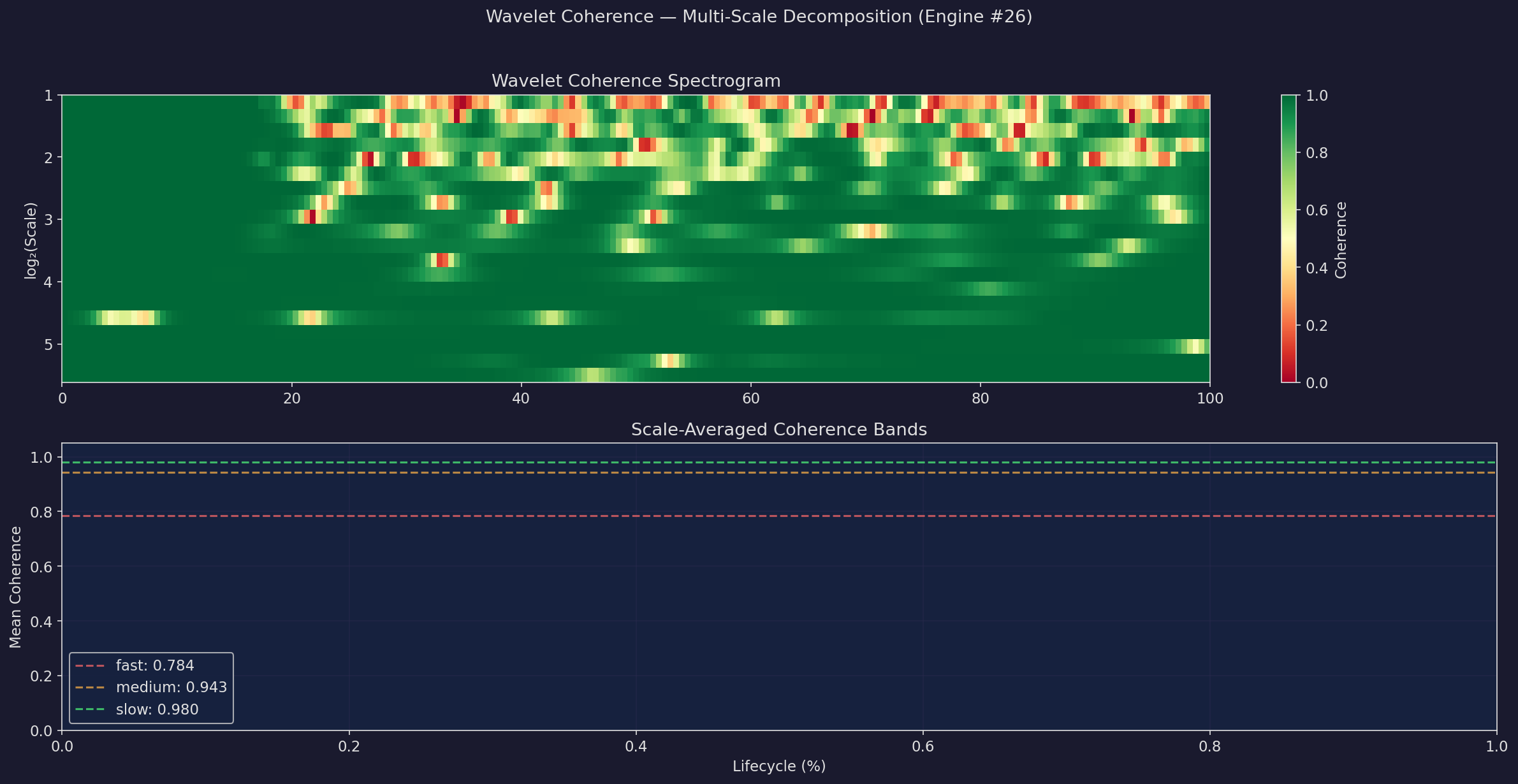
Wavelet Coherence — Multi-Scale Decomposition
Scale-Resolved Coherence Spectrum
Morlet wavelet transform decomposes coherence into fast, medium, and slow
timescales. Reveals whether degradation appears first at fast or slow scales.
Multi-engine validation
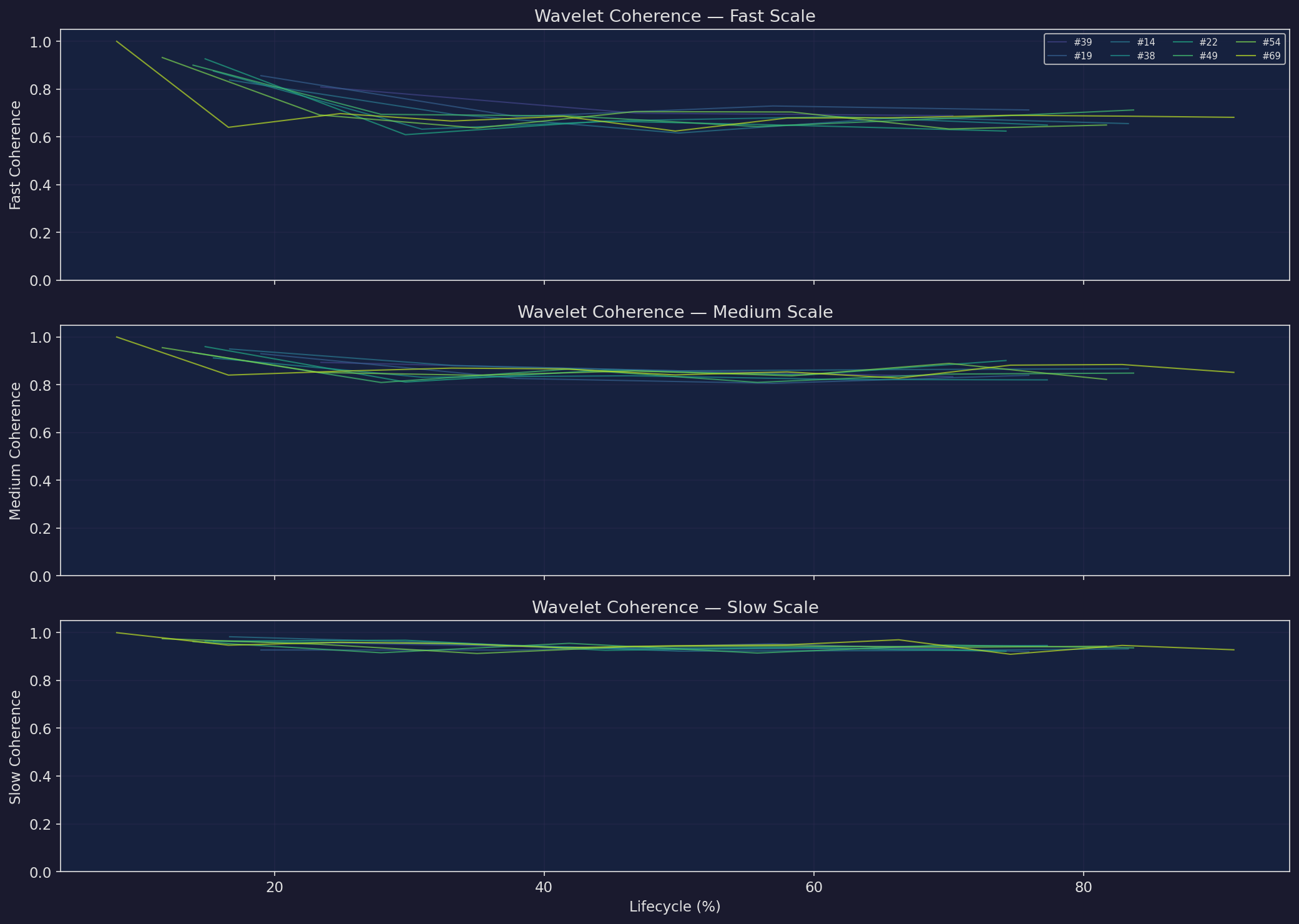
Coherence loss at different timescales follows distinct patterns across the
engine lifecycle, validating the multi-scale nature of degradation.
Multi-Scale
Lyapunov Exponents — Dynamical Stability
Rolling Local Lyapunov Exponent
The largest Lyapunov exponent (LLE) measures sensitivity to initial conditions.
Positive LLE = chaotic, negative = stable. Rolling LLE tracks the system's
approach to chaos over the degradation trajectory.
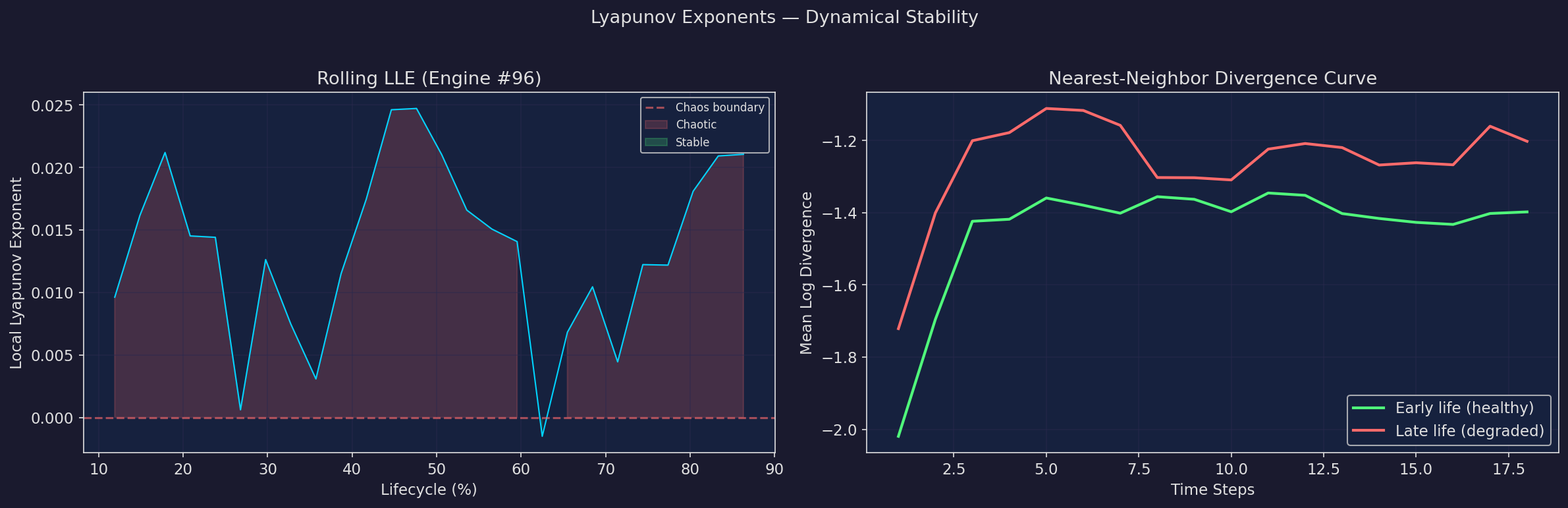
Multi-engine validation
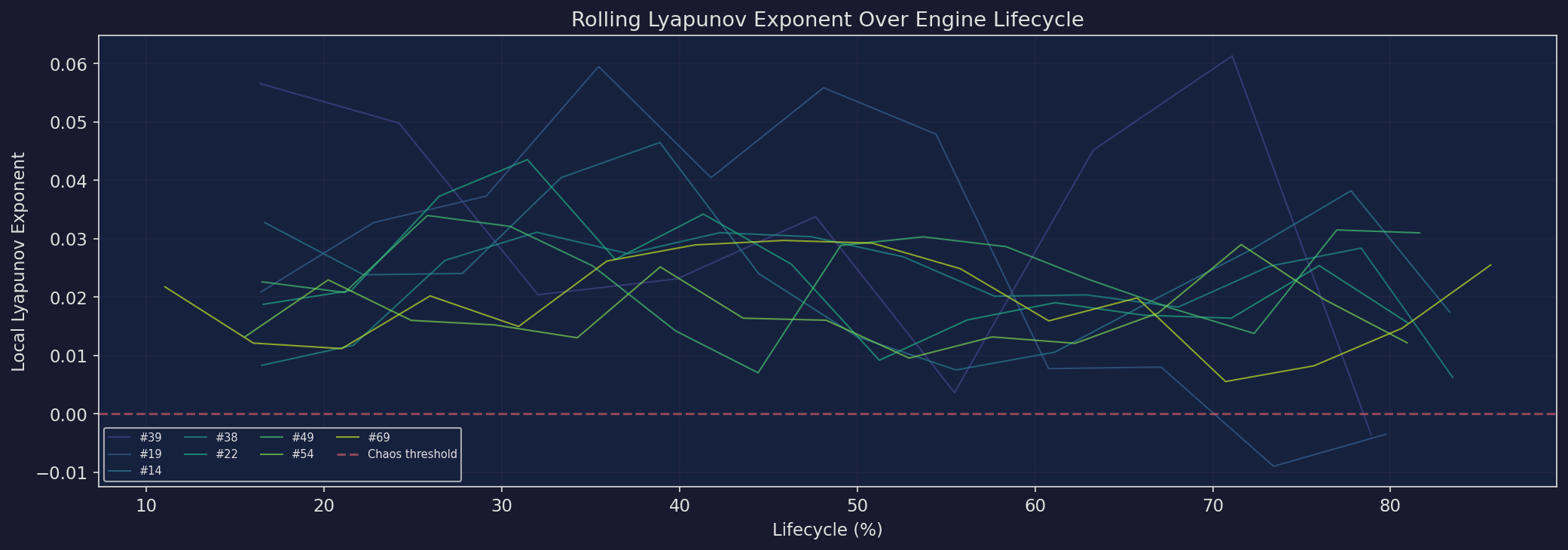
| Engine | Regime |
|---|---|
| #39 | chaotic |
| #19 | edge |
| #14 | edge |
| #38 | edge |
| #22 | edge |
| #49 | edge |
| #54 | edge |
| #69 | edge |
BOCPD — Bayesian Online Change Point Detection
Benchmark Competitor: Change Points vs Δ Alerts
Direct comparison: when does BOCPD detect a change point vs when does Δ
drop below threshold? Green vertical lines = BOCPD change points.
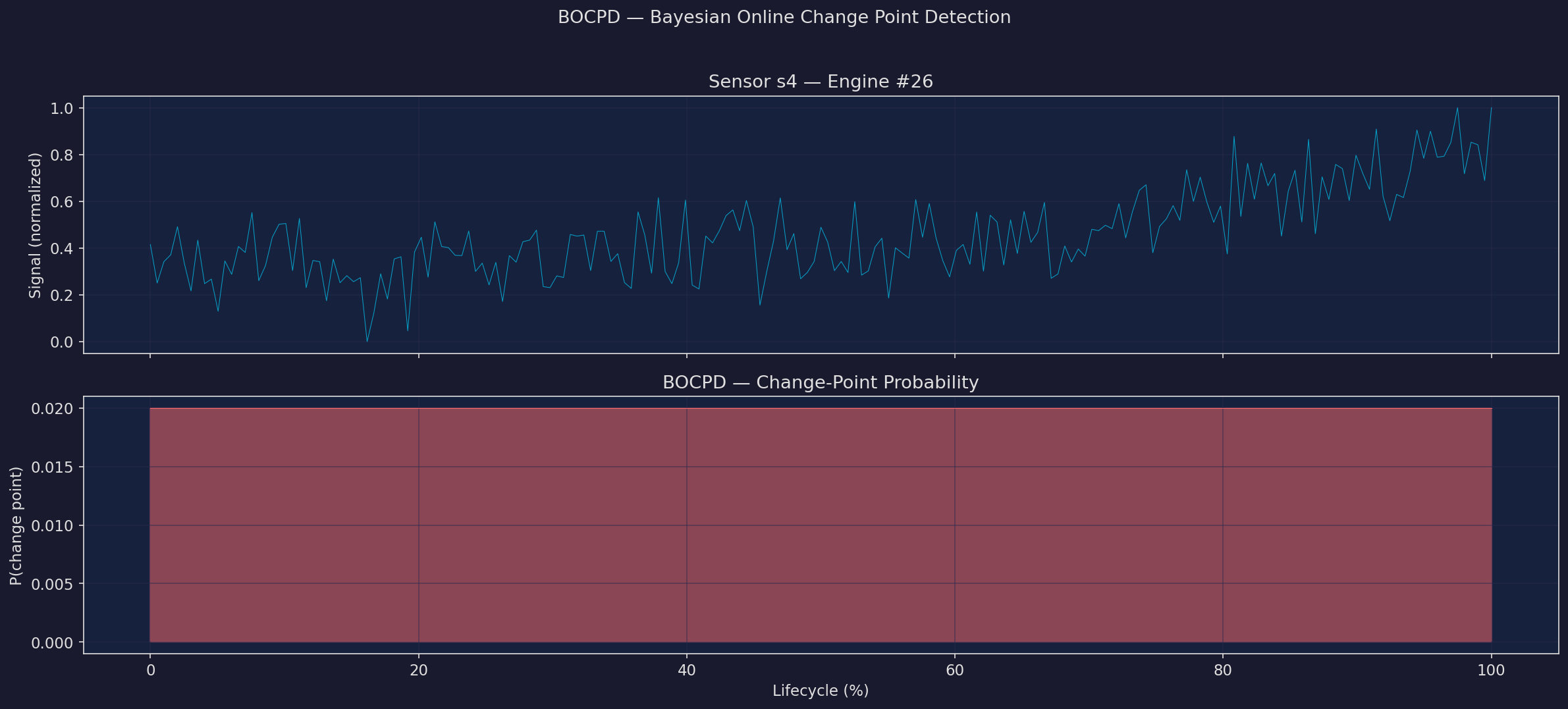
Multi-engine validation
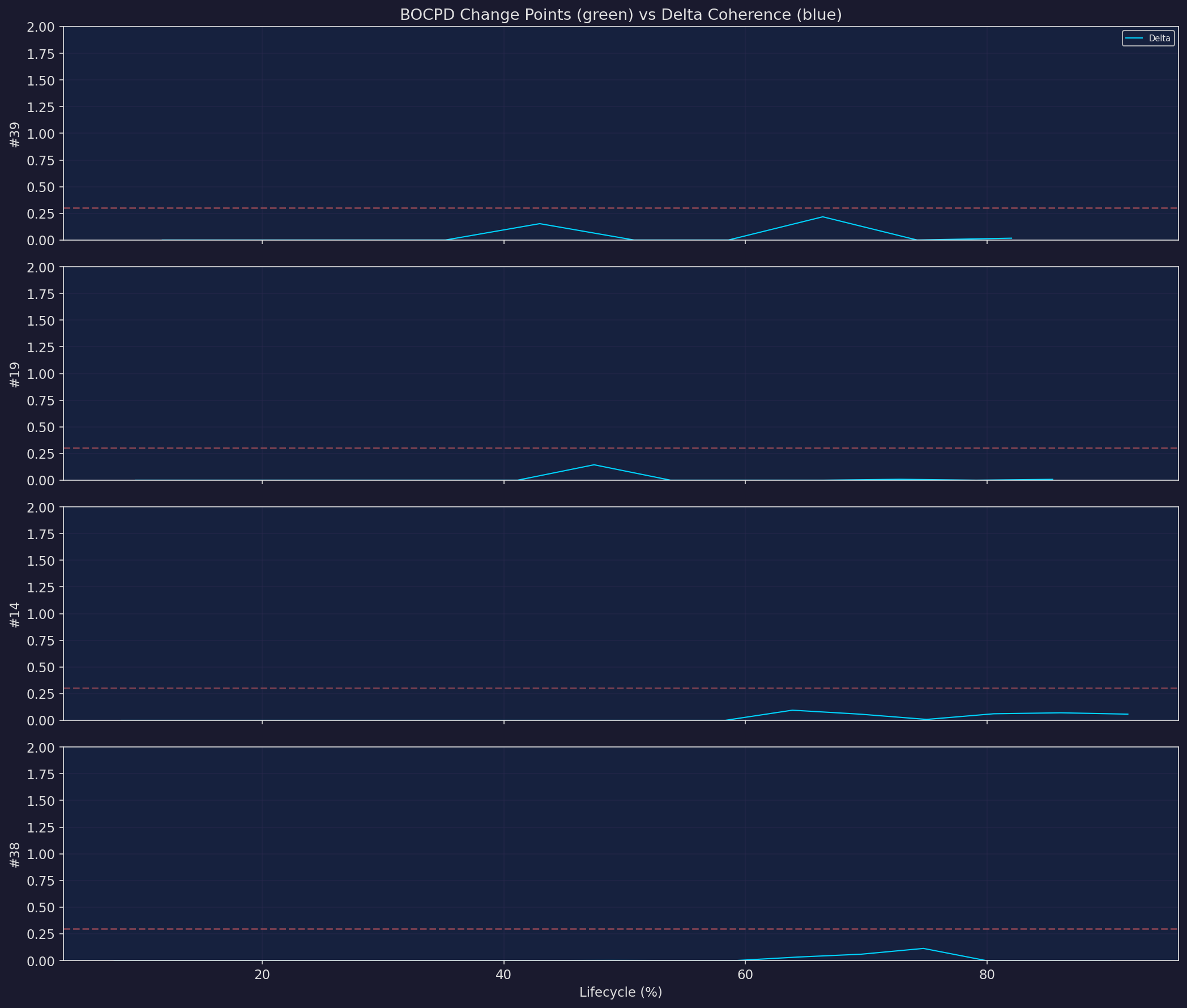
| Engine | BOCPD Change Points |
|---|---|
| #39 | 0 |
| #19 | 0 |
| #14 | 0 |
| #38 | 0 |
| #22 | 0 |
| #49 | 0 |
| #54 | 0 |
| #69 | 0 |
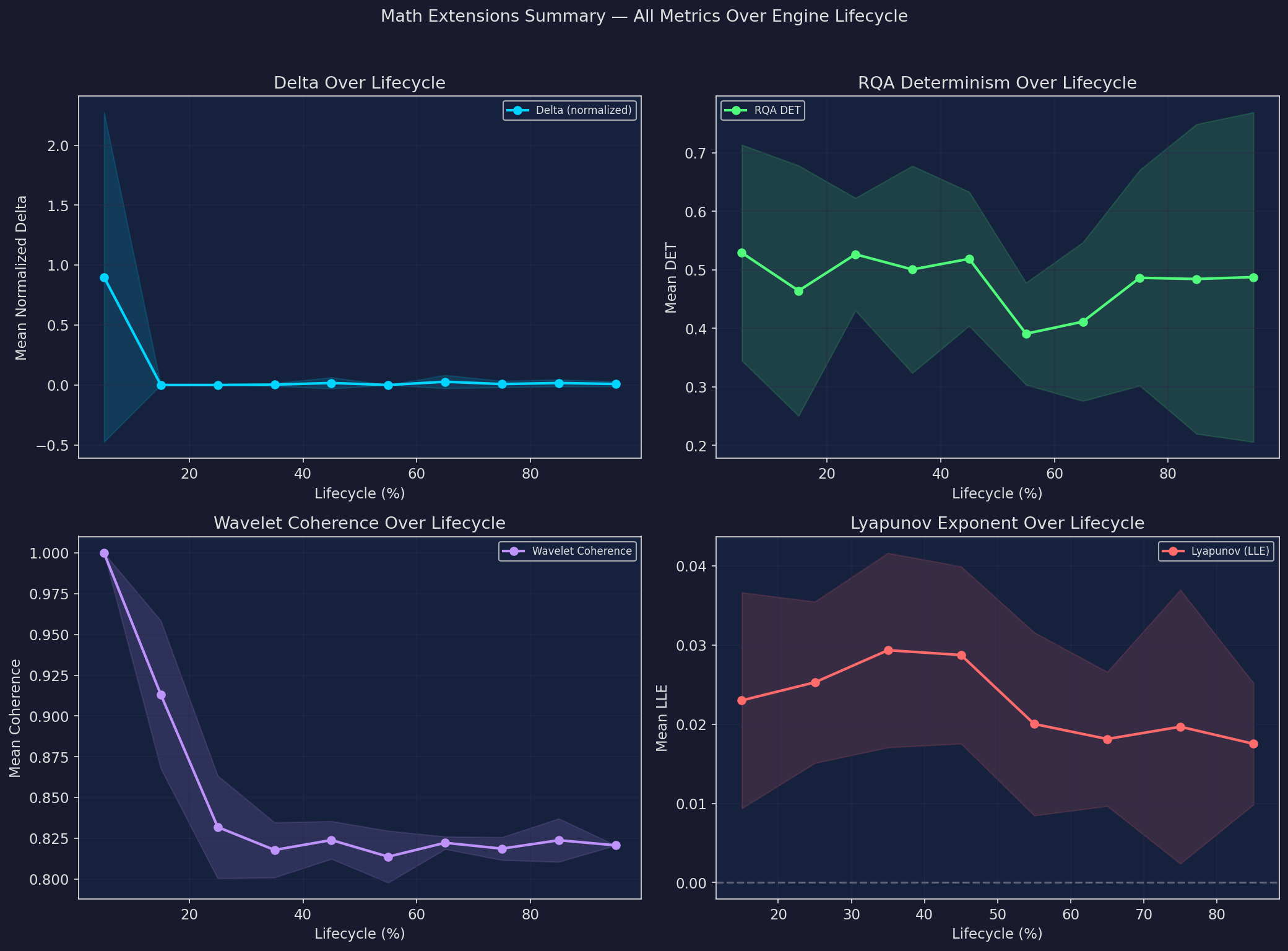
Combined Summary
All Metrics Over Engine Lifecycle
Lifecycle-binned averages of Δ, RQA Determinism, Wavelet Coherence,
and Lyapunov exponent across all 8 sample engines.
Tier 2 — Advanced Extensions
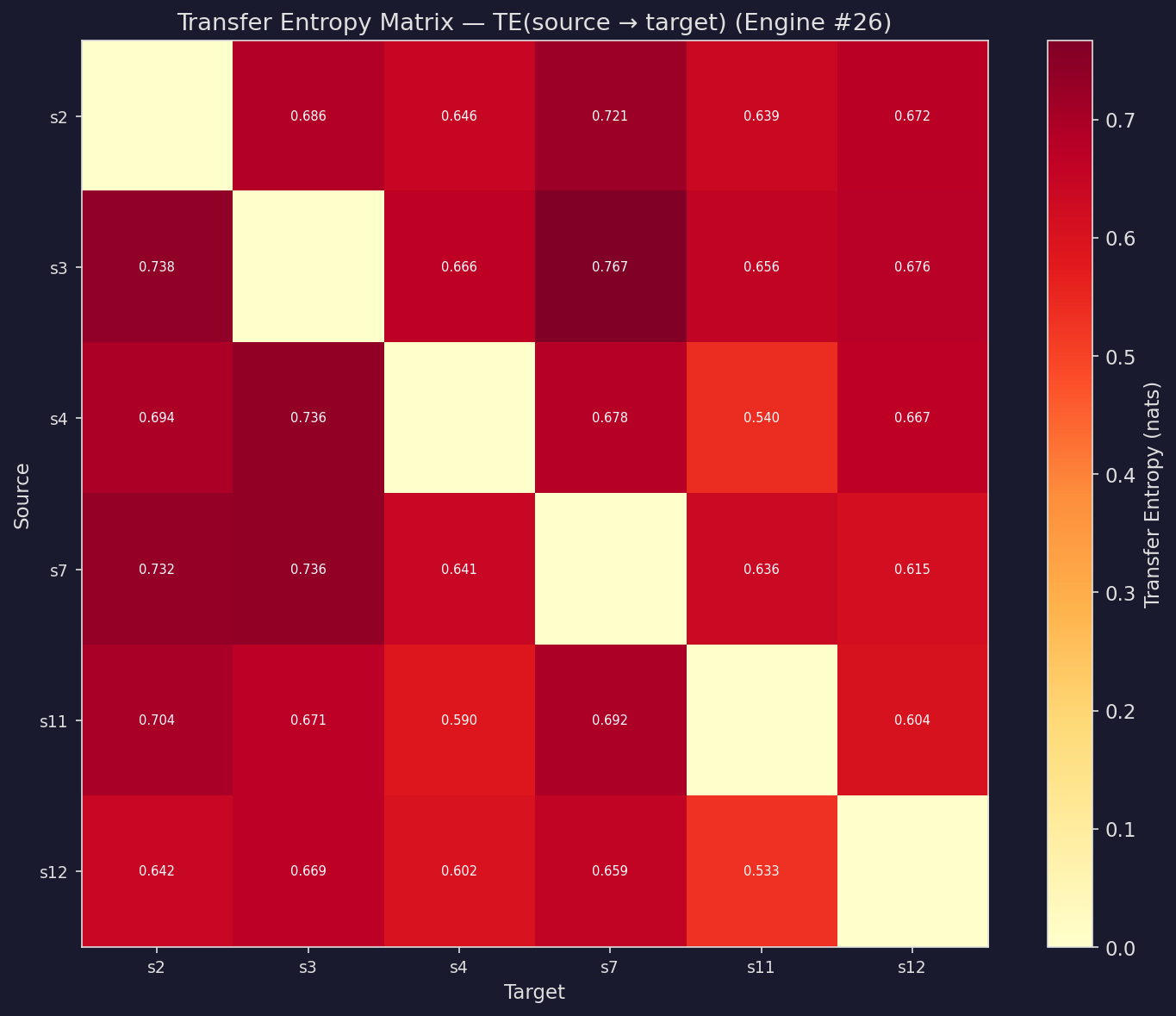
Transfer Entropy — Directed Information Flow
Causal Structure Between Sensors
TE(X→Y) measures how much X's past reduces uncertainty about Y's future. The matrix reveals which sensors drive degradation in others.
Phase Space Reconstruction — Takens' Embedding
Attractor Geometry: Healthy vs Degraded
Time-delay embedding reconstructs the system's attractor. Healthy = compact orbit. Degraded = smeared, expanding attractor.

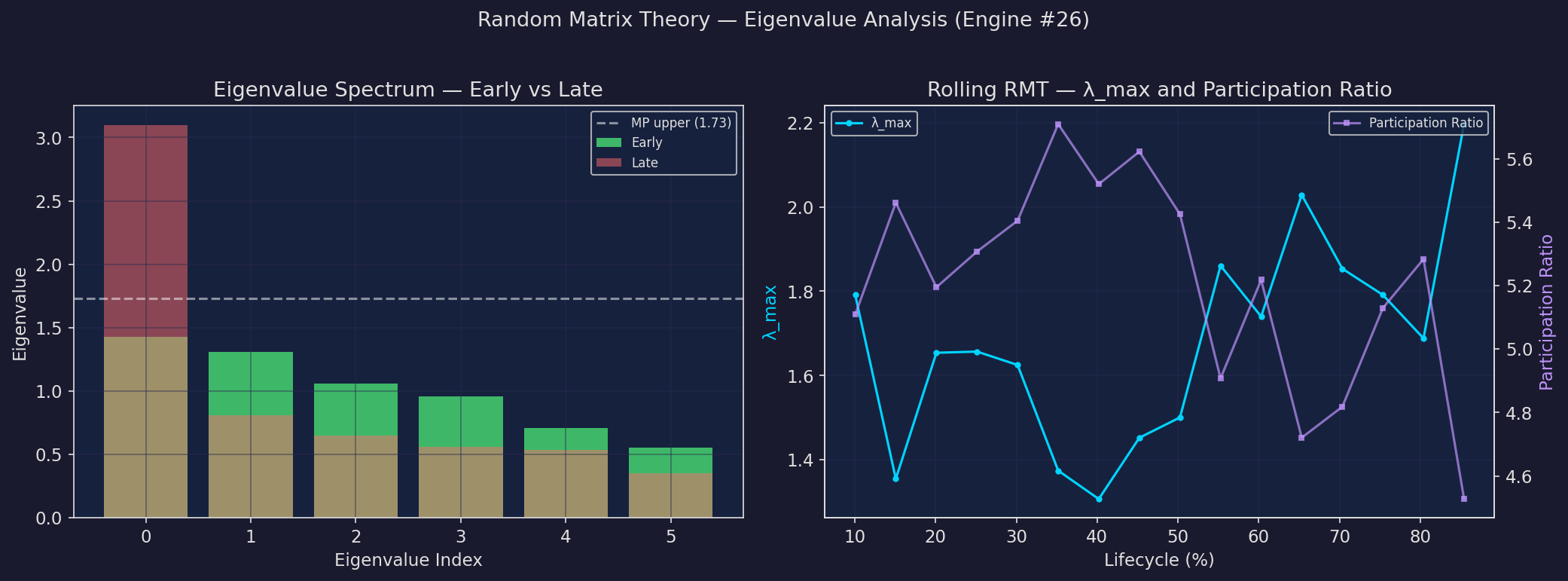
Random Matrix Theory — Eigenvalue Analysis
Marchenko-Pastur Bounds + Rolling λmax
Multi-sensor correlation matrix eigenvalues. Signal eigenvalues exceed the Marchenko-Pastur noise bound. Inspired by Charles Martin's WeightWatcher.
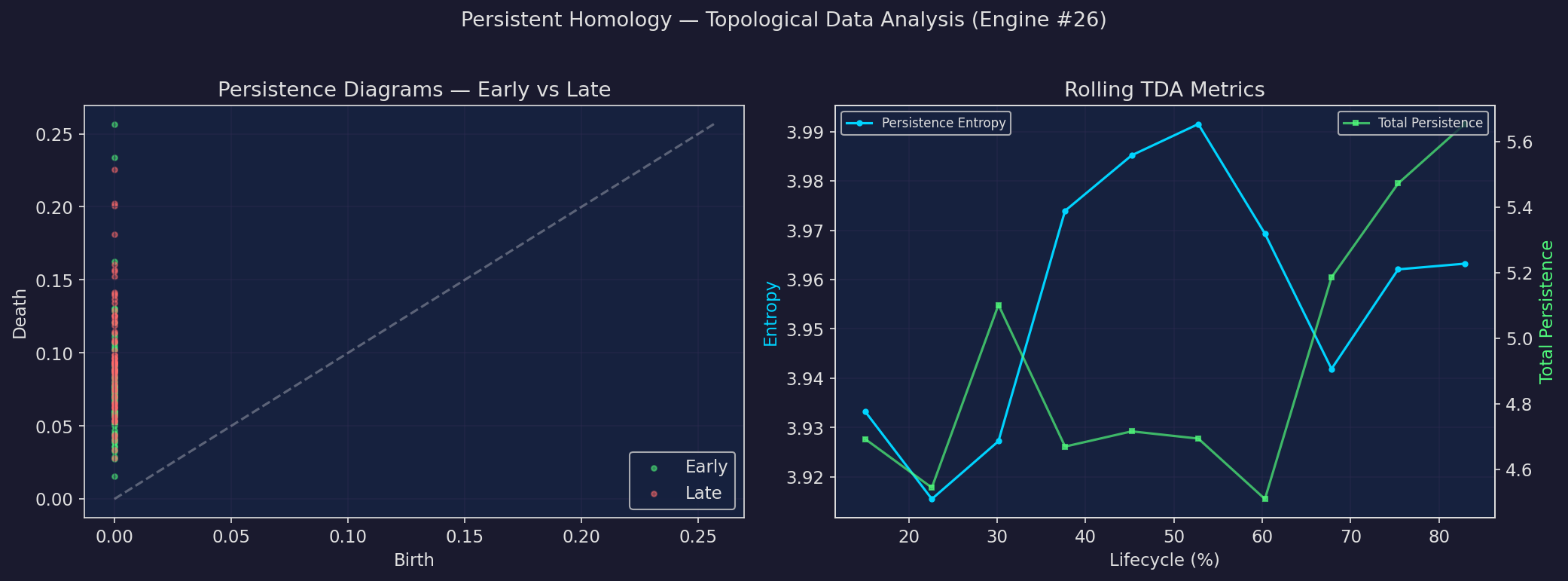
Persistent Homology — Topological Data Analysis
Persistence Diagrams + Rolling Entropy
Tracks the "shape" of data as it evolves. Points far from the diagonal represent stable topological features.
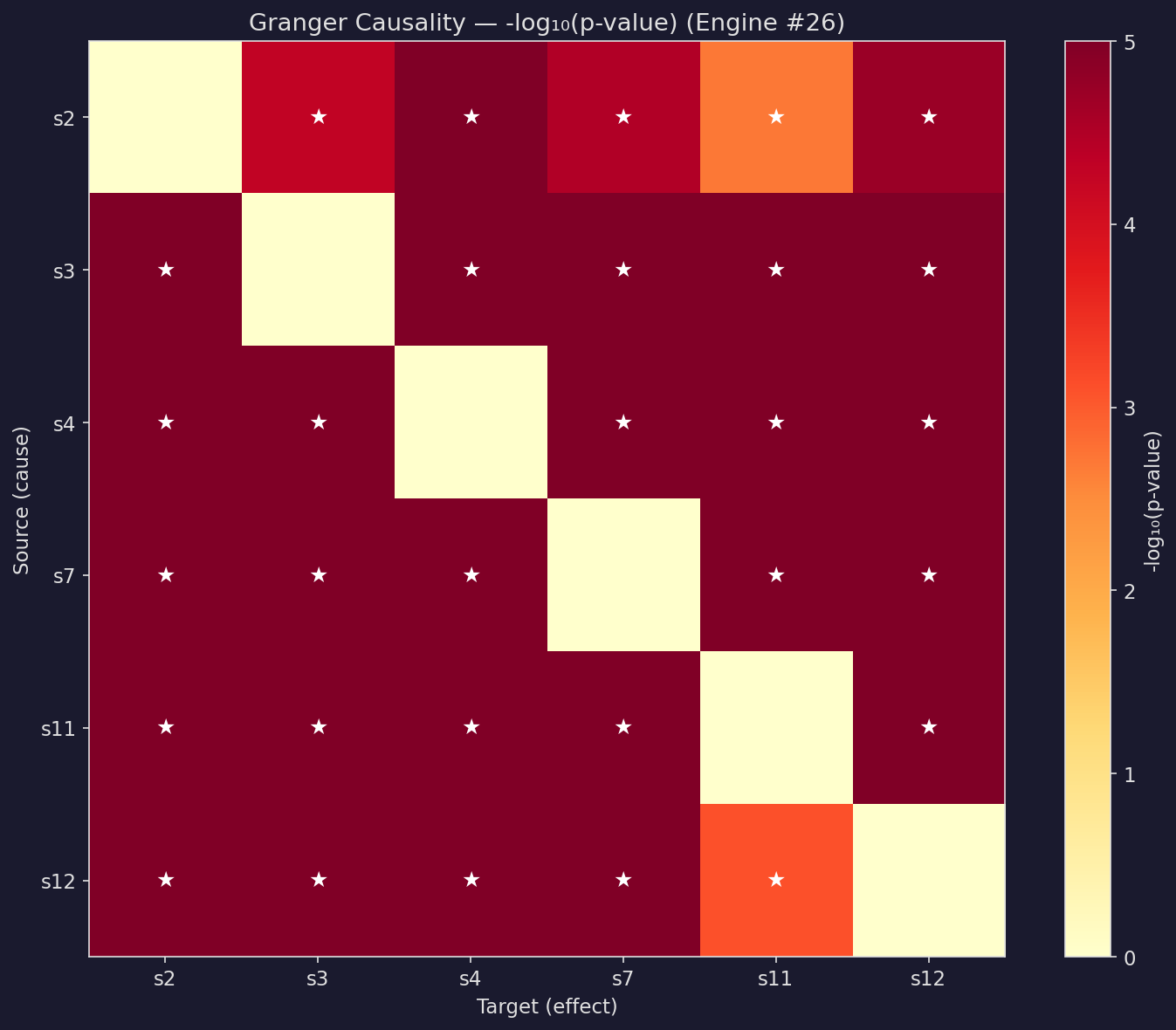
Granger Causality — Statistical Causation
Pairwise Causal Network Between Sensors
F-test for whether one sensor's past helps predict another. Stars (☆) mark statistically significant causal links (p<0.05).
Tier 3 — Research Frontier
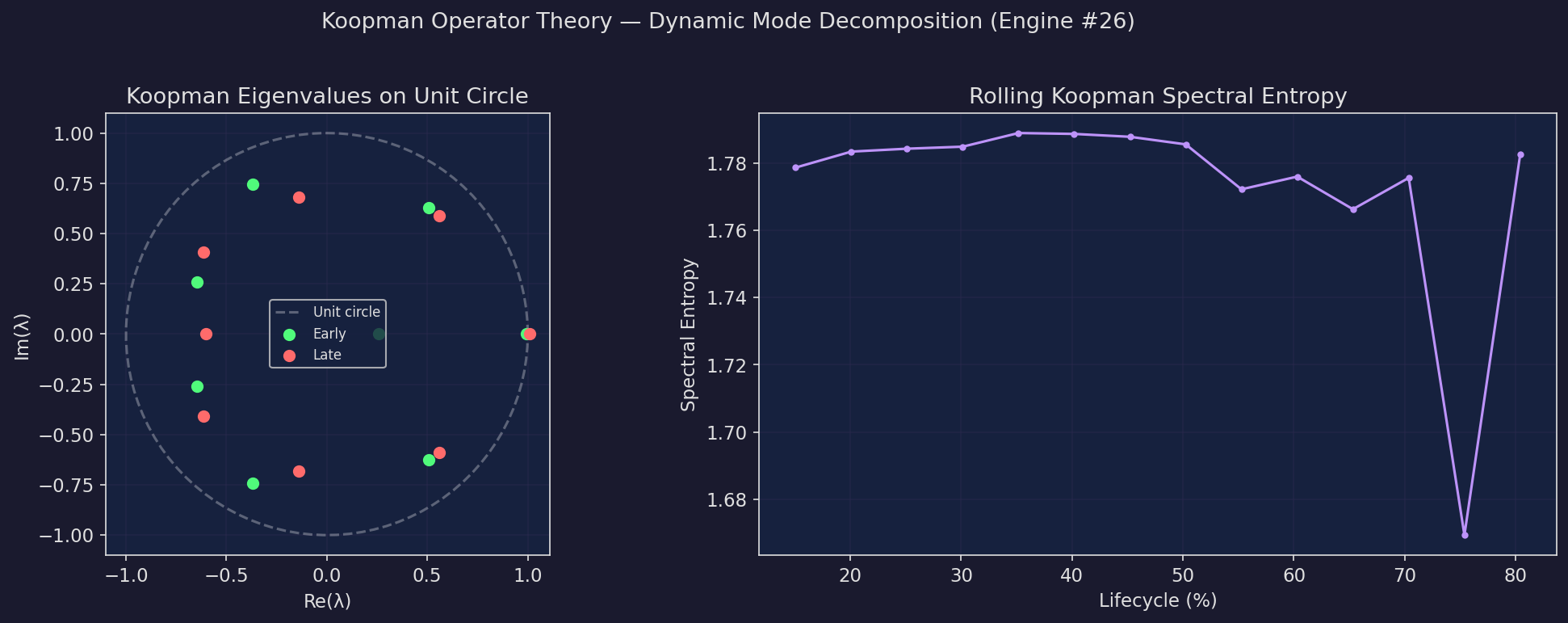
Koopman Operator Theory — Dynamic Mode Decomposition
Eigenvalues on the Unit Circle + Spectral Entropy
DMD approximates the Koopman operator. Eigenvalues inside the unit circle = decaying modes (stable). Outside = growing modes (unstable).
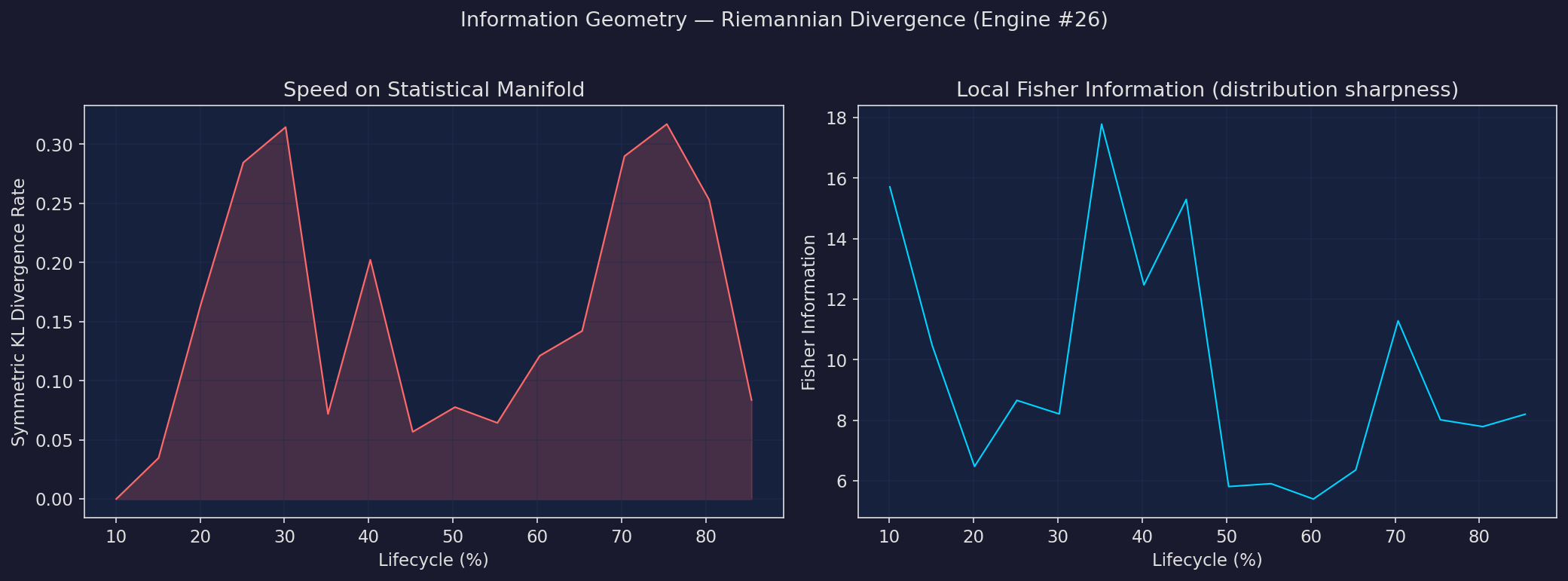
Information Geometry — Riemannian Divergence
Speed on the Statistical Manifold + Fisher Information
Measures how fast the signal's probability distribution is changing. High divergence rate = rapid state transition = approaching failure.
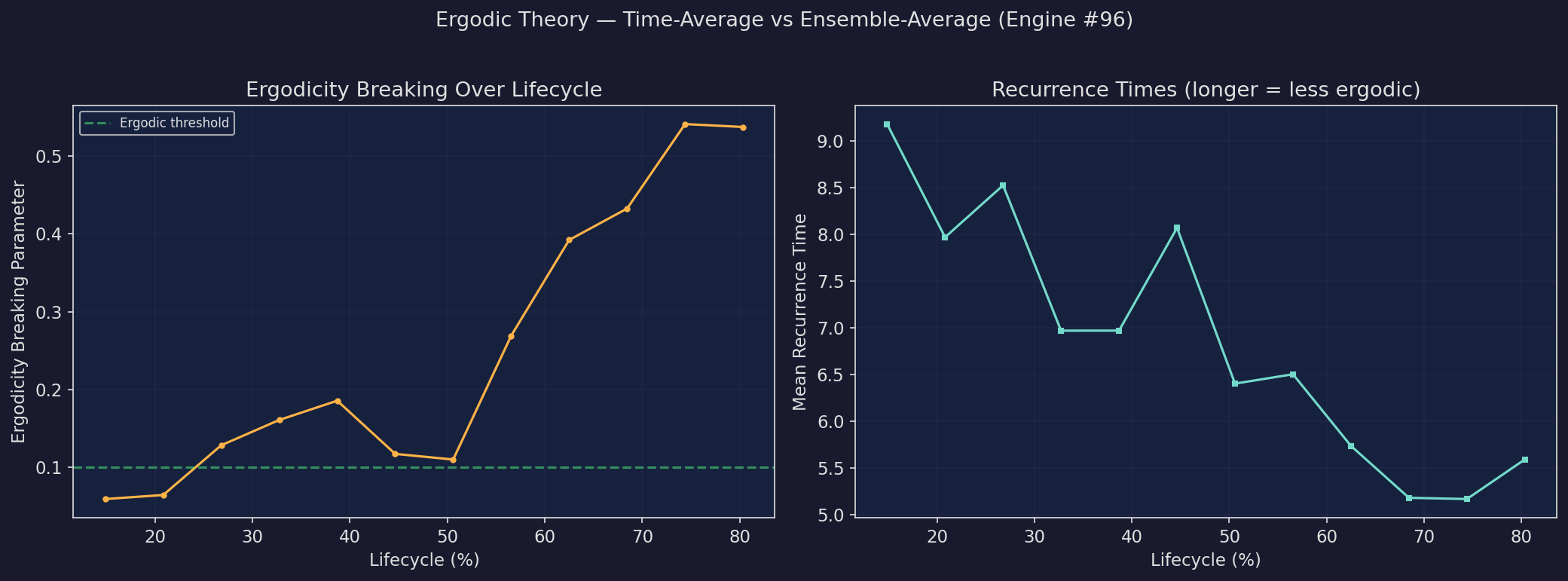
Ergodic Theory — Time vs Ensemble Averages
Ergodicity Breaking + Recurrence Times
A coherent system is ergodic (time averages = ensemble averages). Loss of ergodicity signals a phase transition in the system's dynamics.
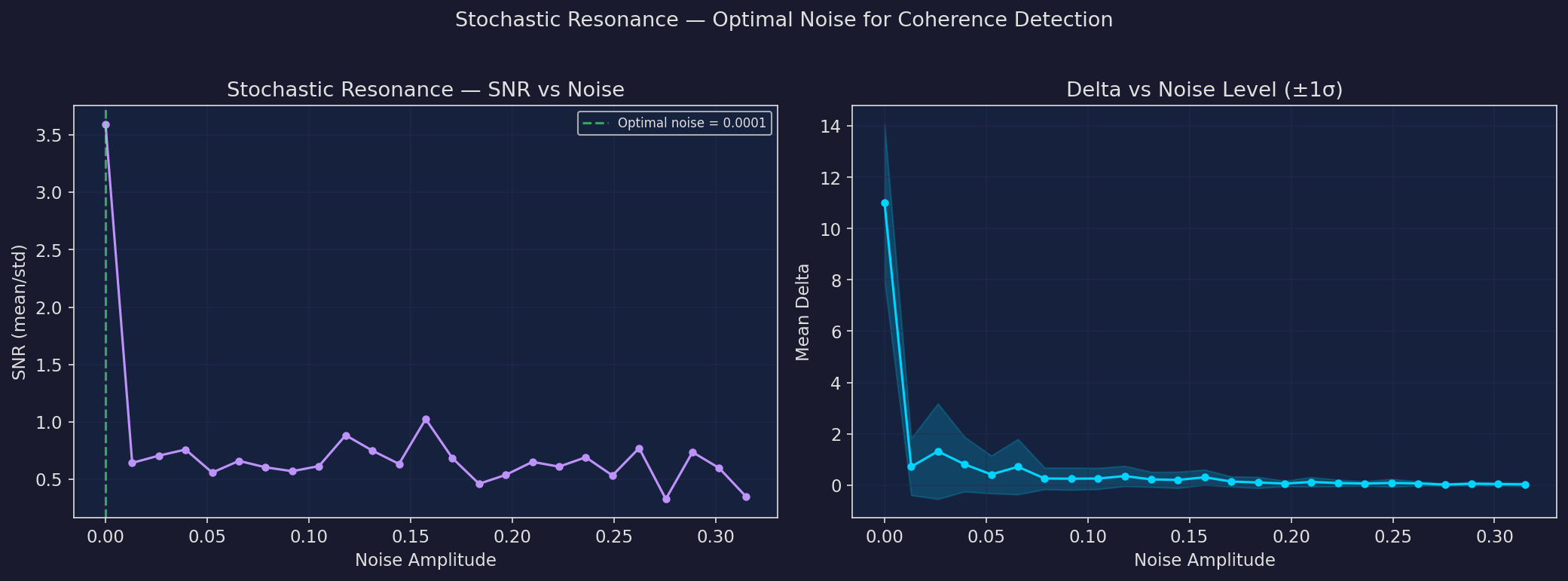
Stochastic Resonance — Optimal Noise
SR Curve: Signal-to-Noise Ratio vs Noise Level
Noise can enhance signal detection in nonlinear systems. The SR curve reveals the optimal noise level for coherence measurement — connecting to why the 0.72 threshold exists.
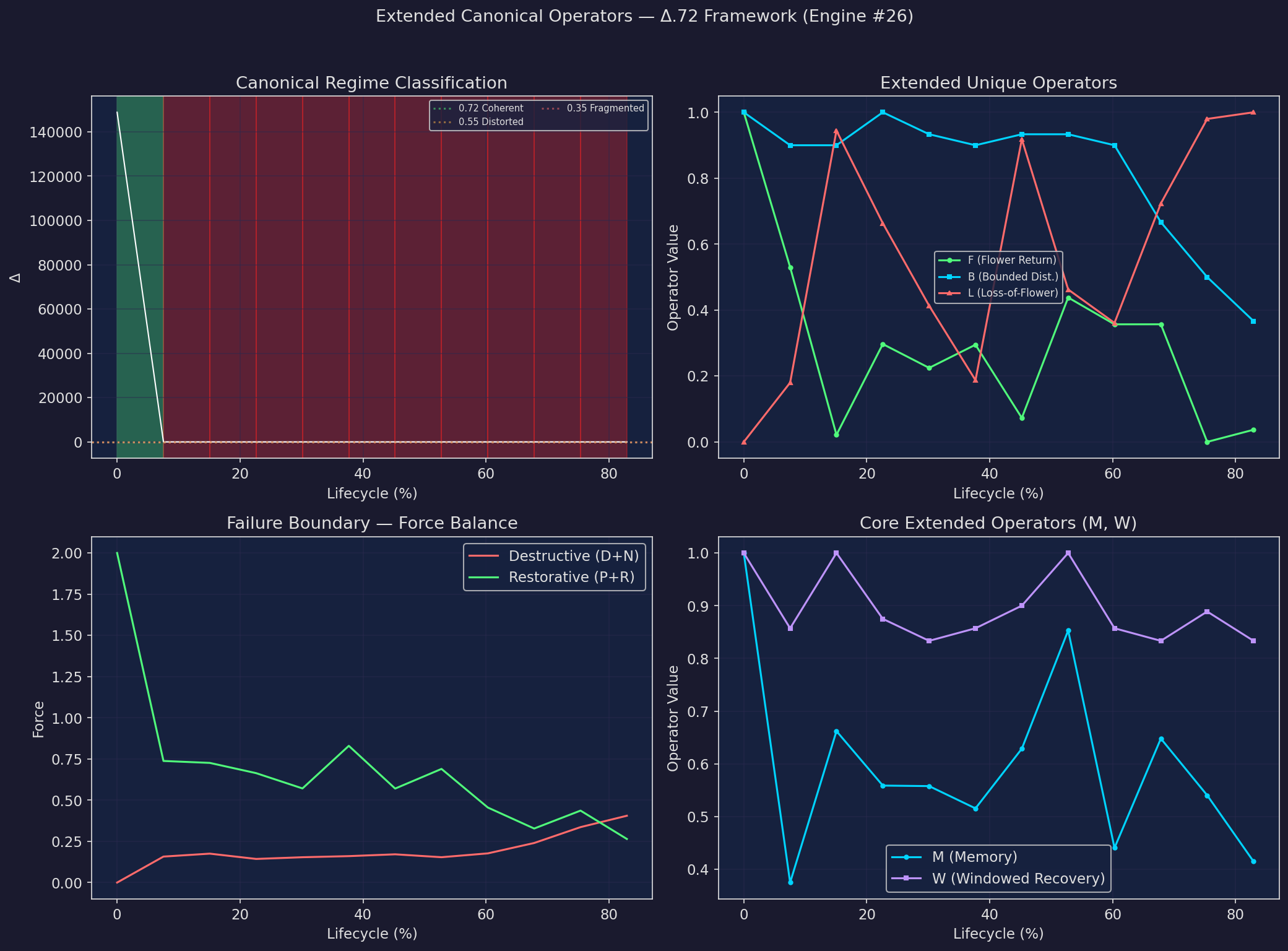
Extended Canonical Operators — Δ.72 Framework
Regime Classification + F/B/L Operators + Failure Boundary
The five extended operators from the canonical algorithm. Regime map shows the four phases (Coherent/Distorted/Fragmented/Collapse). Force balance tracks the failure boundary condition.
Module Reference
rqa.py
wavelet.py
lyapunov.py
bocpd.py
transfer_entropy.py
phase_space.py
rmt.py
tda.py
granger.py
koopman.py
info_geometry.py
ergodic.py
stochastic_resonance.py
extended_operators.py
All modules at src/delta72/ — pure numpy implementations, no external dependencies.
Runtime: 1.7s for full validation suite.
Related
Δ.72 Canonical Framework — Full equation reference, dimensional analysis, regime boundaries, extended operators.
Coherence Engine — Live coherence scoring platform.